Predicting Forest Fire with Mesa
The goal of this simulation is to implement the Forest Fire Model using an objected oriented approach using Mesa Agent.
We will do the following:
-
Create a
FireAgentclass. The fire agent should have two methods__init__andstep.- The
__init__method should have four parameters, self, pos, value, and model. The pos parameter should represent the position of the agent on the grid. The value parameter should represent ‘clear’, ‘tree’, or ‘on fire’ by 0,1, and 2. Thestepmethod should input one parameter, self, and it should evolve the fire according to the same rules as in the lecture, e.g., if the current state ison fire, then at the next time step it should go to clear.
- The
-
Create a
FireModelclass with five methods__init__,step,summarize,show_snapshot, andshow_hist.- The
__init__method should take in five parameters, self, width, height, fire_density, and tree_density. Width and height are the dimensions of the board. fire_density and tree_density are the approximate fractions of fire squares and tree squares. Your method should for loop over the board and place an agent at each spot (so if your board is $N\times N$ you should have $N^2$ agents). Choose each agents values to be 0, 1, or 2 randomly where the probability of a fire square isfire_density, and the probability of tree istree density. Your init method should also create an instance variableself.history. This variable should be a list, which at initialization has length one. The single item inself.history(at this step) should be a numpy array consisting of 0’s, 1’s, and 2’s representing the state of the board. - The
stepmethod should have one parameter, self, and should move the model one step forward in time similar to the segregation model done in class. It should also append a numpy array describing the current state of the board to the list self.history. - The
summarizemethod should have two parameters,selfandtime. It should output a tuple of length three giving the percentage of 0’s, 1’s and 2’s at the specified time. The time parameter should have a default value of ` “all” `. If time is equal to all, summarize should return a list of tuples describing the state of the forest at all time steps so far. - The
show_snapshotmethod should have three parameters,self,time, andax. It should display the state of the forest, in a plot similar to lecture, at the sepcified time and on the specified axis. - The
show_histmethod should take three parameters,self,start, andstop. It should usesubplotsto display the state of the forest between the specified start and stop times (inclusive). For full credit, you show_hist method should call your show_snapshot method.
- The
Import Libraries
from mesa import Model, Agent
from mesa.time import RandomActivation
from mesa.space import SingleGrid
import numpy as np
import matplotlib.pyplot as plt
To learn more about Mesa: Agent-Based modeling, read this
Define Helper Functions
def count_val(Model, Value):
'''
Helper function for Stopping condition (When there is no fire to spread)
Count number of Agents with a given value in a given model.
'''
count = 0
for FireAgent in Model.schedule.agents:
if FireAgent.value == Value:
count += 1
return count
def grid_to_array(Model):
'''
Helper function for Fire Model
mesa.space has a grid, which is different from np.array
we need to convert the grid to np.array to store log history
Arg:
Model: Model which grid will be converted to numpy array
'''
grid = np.array(Model.grid._grid)
log = np.zeros(grid.shape)
for i in range(grid.shape[0]):
for j in range(grid.shape[1]):
if grid[i,j] is not None:
if grid[i,j].value == 1:
log[i,j] = 1
elif grid[i,j].value == 2:
log[i,j] = 2
else:
log[i,j] = 0
return log # returns np.array
Define Fire Agent Class
class FireAgent(Agent):
'''
FireAgent of FireModel
inherits from mesa.Agent
Attributes:
pos: Grid coordinates
value: Can be 0:clear 1:Tree 2:Fire
model: Inherit model
'''
def __init__(self,pos,value,model):
'''
Create a new Agent.
Parameter:
pos: The Agent's coordinates on the grid
model: Inherit model
value: Can be 0:clear 1:Tree 2:Fire
'''
super().__init__(pos,model)
self.pos = pos
self.value = value
def step(self):
'''
We progress the model (spreading fire) with .step method
If the tree is on fire(2), spread it to normal(1) trees nearby.
If the current state is on fire (2), then at the next time step it should go to clear (0).
'''
if self.value == 2:
neighbors = self.model.grid.get_neighbors(self.pos, moore=False)
for neighbor in neighbors:
if neighbor.value == 1:
neighbor.value = 2
self.value = 0
class FireModel(Model):
'''
Simple Fire Model
inherits from mesa.Agent
Attributes:
schedule: Schedule to call the step() method of each of the agents in specified sequence.
grid: The space on which the simulation unfolds.
history: A list, consisting of numpy arrays of 0's, 1's, and 2's which represnt the state of the board of each timestep.
running: running property of mesa.model, to halt when there is no fire
'''
def __init__(self,width,height,fire_density,tree_density):
'''
Create a new Fire Model.
Parameter:
height, width: The size of the grid to model
tree_density: What fraction of grid cells have a tree in them.
fire_density: What fraction of grid cells have a fire in them.
'''
# Set up model objects
self.schedule = RandomActivation(self) # Agents will be activated in random order
self.grid = SingleGrid(width,height,torus=False)
self.history = [] # array to keep the log history
# Initialize FireAgents
for cell in self.grid.coord_iter():
x=cell[1]
y=cell[2]
# Random assignment according to probability (density)
random_agent_val = np.random.choice(3,p=[1-fire_density-tree_density,tree_density,fire_density])
agent = FireAgent(pos=(x,y),value = random_agent_val ,model=self)
self.schedule.add(agent)
self.grid.position_agent(agent,x,y)
# Convert Model.grid to np.array
log = grid_to_array(self)
# Append to self.history
self.history.append(log)
# Model running live
self.running = True
def step(self):
'''
Advance the model by one step.
'''
# Advance each agents by one step according to schedule.
self.schedule.step()
# Convert the current Model.grid status to np.array
log = grid_to_array(self)
# Append to self.history
self.history.append(log)
# Stop if no more fire
if count_val(self,2) == 0:
self.running = False
def summarize(self,time="all"):
'''
Output a tuple of length three giving the percentage of 0's, 1's and 2's at the specified time.
Parameter:
time: Specified time. Default value of "all", which returns a list of tuples describing the state of the forest at all time steps.
'''
if time == "all":
l = []
for log in FM.history:
# Count occurrence of each values
unique, counts = np.unique(log, return_counts=True)
# Convert to Percentage
arr = counts/sum(counts)*100
t = tuple(arr.round(2))
l.append(t)
return l
else:
# Archieve Time in history
log = FM.history[time]
# Count occurrence of each values
unique, counts = np.unique(log, return_counts=True)
# Convert to Percentage
arr = counts/sum(counts)*100
t = tuple(arr.round(2))
return t
def show_snapshot(self,time,ax):
'''
display the state of the forest at the sepcified time and on the specified axis.
Parameter:
time: sepcified time
ax: specified axis
'''
# Archieve Time in history
log = self.history[time]
x_range=np.arange(log.shape[1])
y_range=np.arange(log.shape[0])
# Initialize Mesh Grid
x_indices,y_indices=np.meshgrid(x_range,y_range)
# Store x and y indices of values
tree_x =x_indices[log==1]
tree_y =y_indices[log==1]
fire_x =x_indices[log==2]
fire_y =y_indices[log==2]
empty_x=x_indices[log==0]
empty_y=y_indices[log==0]
plt.xlim([-1,log.shape[1]])
plt.ylim([-1,log.shape[0]])
# Plot with according markers
ax.plot(empty_x,empty_y,'ws',markersize=2)
ax.plot(tree_x,tree_y,'g^',markersize=2)
ax.plot(fire_x,fire_y,'ro',markersize=2)
def show_hist(self,start,stop):
'''
Use subplots to display the state of the forest between the specified start and stop times
calls show_snapshot method for plotting
Parameters:
start: specified start time
stop: specified stop time
'''
# number of subplots to plot
num = stop - start
# Generate subplots
fig, axarr = plt.subplots(num//5+1,5, figsize=(num*2,num))
# Plot each subplots
t = start
for ax in axarr.flatten():
if t <= stop:
ax.set(title = f"timestep {t}")
FM.show_snapshot(t,ax)
t += 1
# Turn off axis for better view
ax.axis("off")
# Show the plot
plt.tight_layout()
plt.show()
Demostration
Initialize Model
FM = FireModel(50,50,.005,.7)
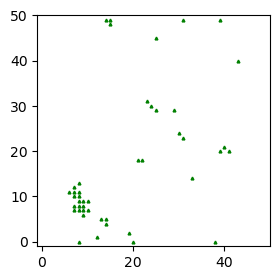
Visualize via show_snapshot
# Using show_snapshot
fig, ax = plt.subplots(figsize=(3,3))
FM.show_snapshot(0,ax)
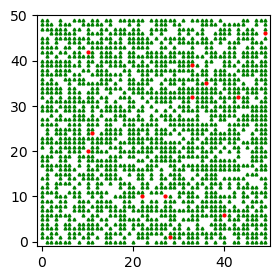
Show the summary statistic of the timestep
# See the percentage of 0:clear 1:Tree 2:Fire
# default showing all timestep
FM.summarize()
[(29.6, 69.92, 0.48)]
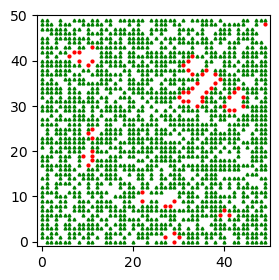
Simulate Step by Step
# Advance the model one step
FM.step()
# Using show_snapshot
fig, ax = plt.subplots(figsize=(3,3))
FM.show_snapshot(1,ax)
# Advance the model
FM.step()
FM.step()
FM.step()
FM.step()
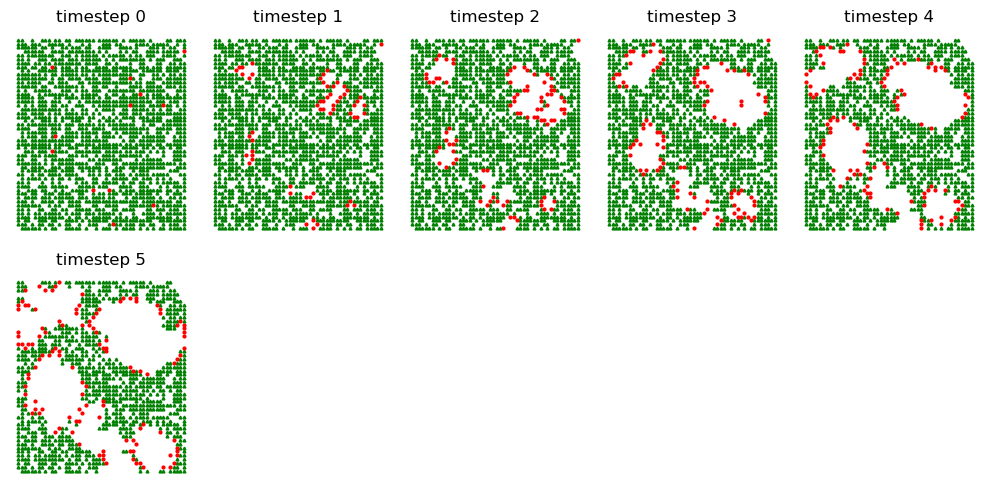
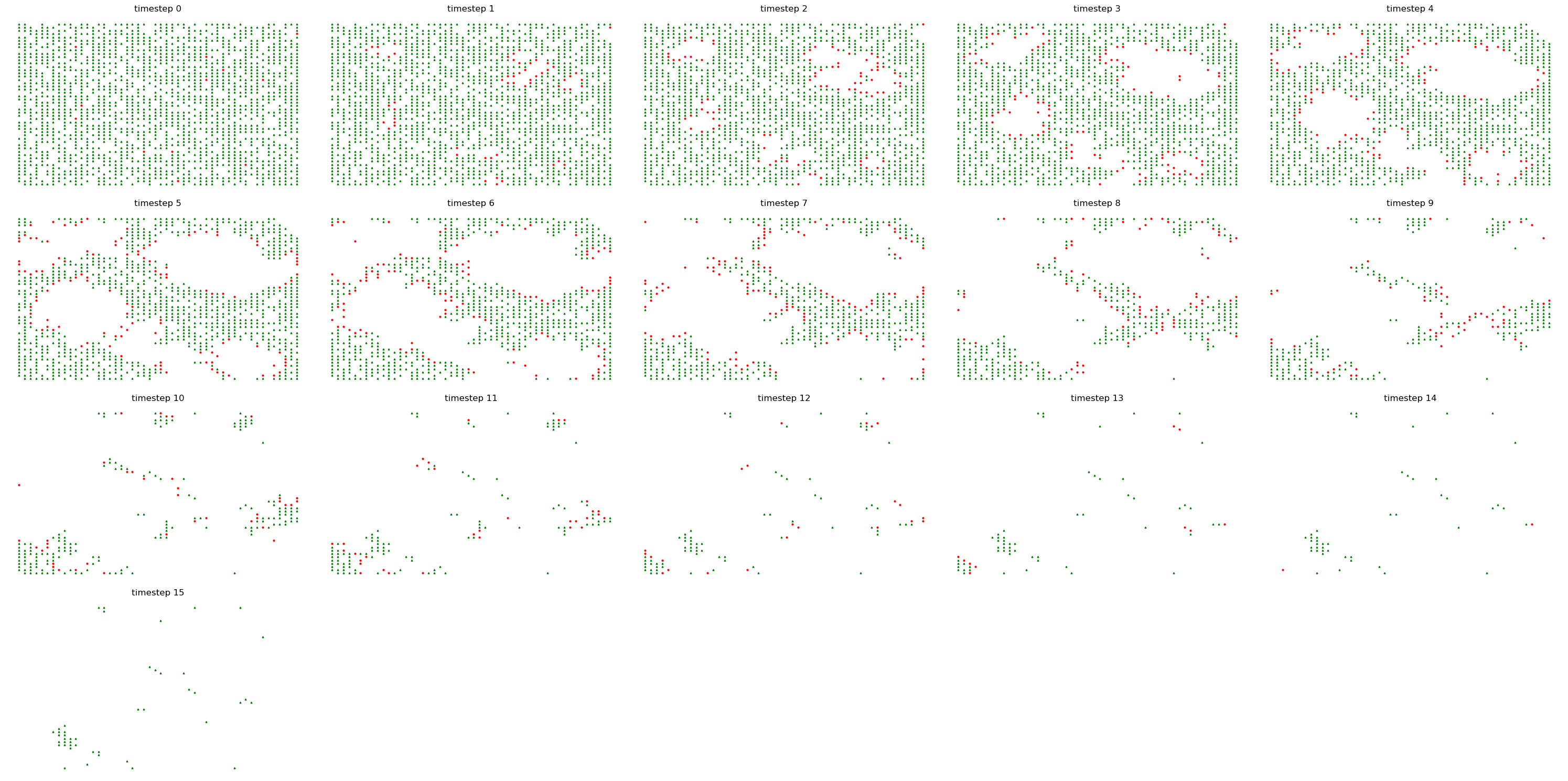
# Using show_hist
FM.show_hist(0,5)
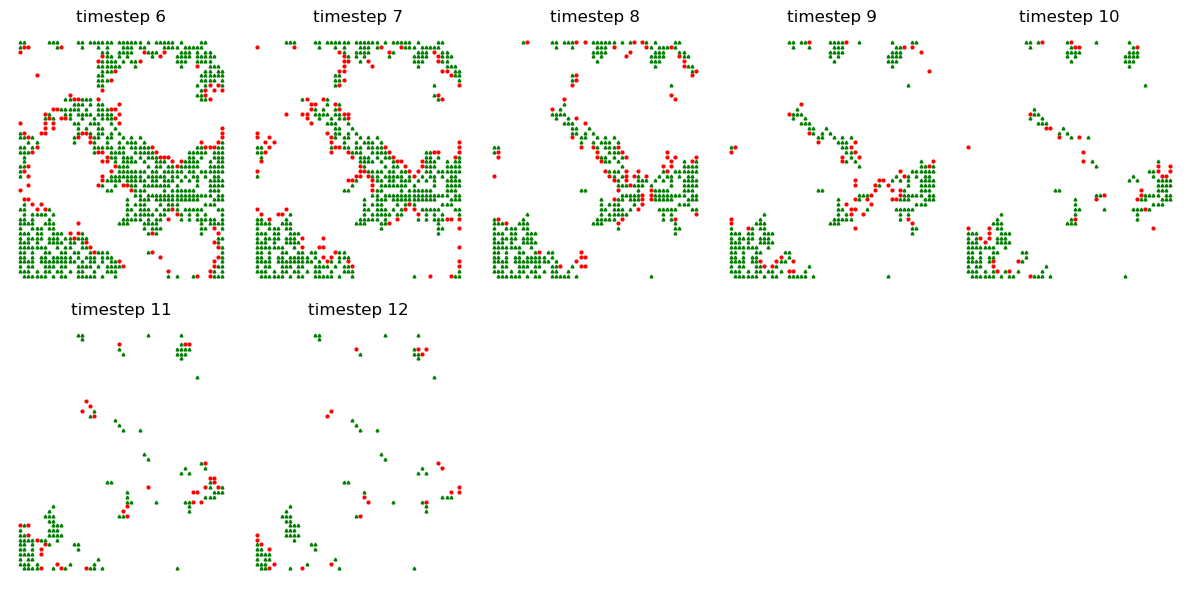
Run the whole model
# Run the whole model until there is no fire
FM.run_model()
FM.show_hist(6,12)
# Whole history
end = len(FM.history) -1
FM.show_hist(0,end)
# See the percentage of 0:clear 1:Tree 2:Fire at the end
FM.summarize(end)
(98.2, 1.8)
# Whole statistics
FM.summarize()
[(29.6, 69.92, 0.48),
(31.72, 65.96, 2.32),
(36.84, 59.64, 3.52),
(43.68, 52.28, 4.04),
(50.92, 44.76, 4.32),
(59.32, 35.76, 4.92),
(66.96, 28.24, 4.8),
(75.68, 19.64, 4.68),
(82.76, 14.12, 3.12),
(87.92, 9.8, 2.28),
(91.52, 6.92, 1.56),
(94.16, 4.56, 1.28),
(96.2, 2.88, 0.92),
(97.32, 2.28, 0.4),
(98.08, 1.84, 0.08),
(98.2, 1.8)]
# Using show_snapshot
fig, ax = plt.subplots(figsize=(3,3))
FM.show_snapshot(end,ax)
Experiment with different values
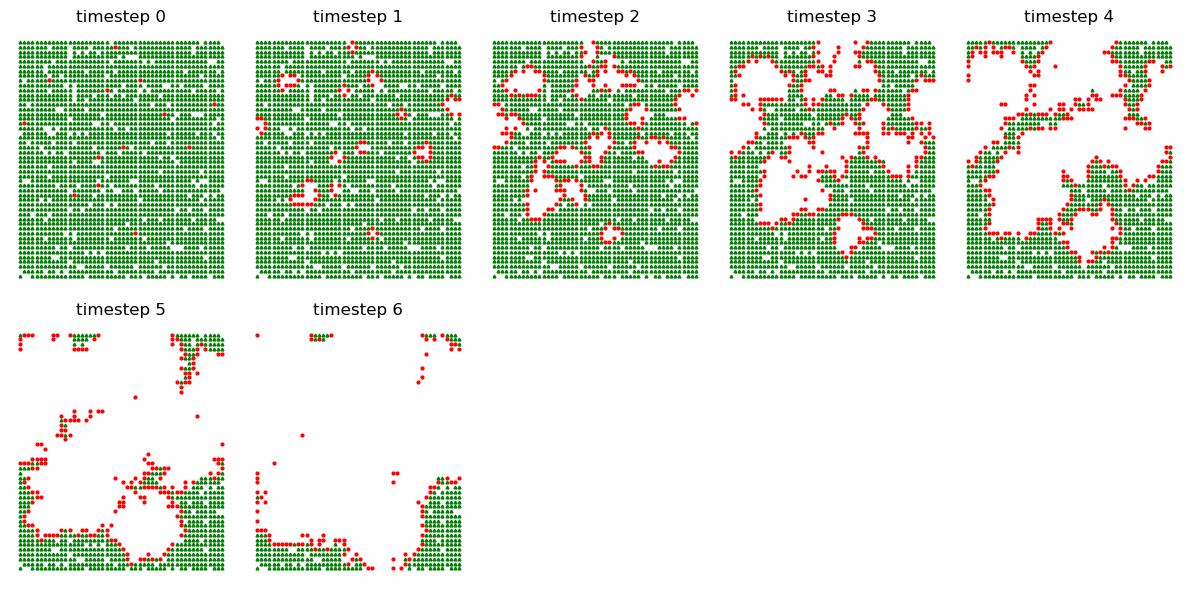
Higher tree density
It seem like the fire spreads more easily when tree density is higher (0.7 → 0.9)
the model stops advancing with fewer timestep
FM = FireModel(50,50,.005,.9)
FM.run_model()
FM.show_hist(0,6)
print("Summary Statistic for the whole timestep (clear, tree, fire)")
print(FM.summarize())
Summary Statistic for the whole timestep (clear, tree, fire)
[(8.28, 91.2, 0.52), (10.16, 86.48, 3.36), (18.64, 73.4, 7.96), (35.32, 53.96, 10.72), (54.8, 34.88, 10.32), (72.6, 19.84, 7.56), (84.6, 11.68, 3.72), (90.28, 7.12, 2.6), (94.44, 3.72, 1.84), (96.92, 2.08, 1.0), (98.72, 0.64, 0.64), (99.64, 0.08, 0.28), (99.96, 0.04)]
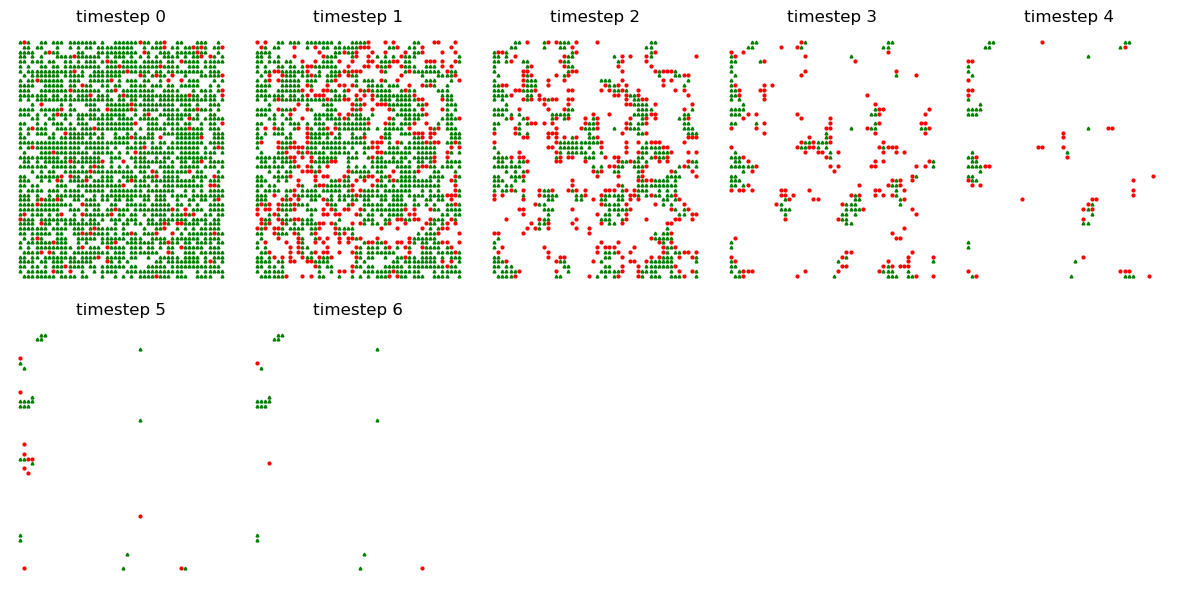
Higer Fire density
It seem like the fire also spreads more easily when fire density is higher (0.005 → 0.05)
the model stops advancing with fewer timestep
FM = FireModel(50,50,.05,.7)
FM.run_model()
FM.show_hist(0,6)
print("Summary Statistic for the whole timestep (clear, tree, fire)")
print(FM.summarize())
Summary Statistic for the whole timestep (clear, tree, fire)
[(25.92, 69.28, 4.8), (40.84, 43.64, 15.52), (69.08, 18.2, 12.72), (88.28, 5.52, 6.2), (96.44, 1.96, 1.6), (98.6, 0.96, 0.44), (99.12, 0.76, 0.12), (99.24, 0.76)]
When Density is Both Lower
When density is both lower, we can observe quite interesting pattern as below.
Because the density is both low, the forest burns for a longer timestep, slowly spreading
And the single fire almost burned the half of the forest.
Even simulations are giving us a lesson that we should be also watchful of even small fires.
FM = FireModel(30,30,.002,.5)
FM.run_model()
fig, ax = plt.subplots(figsize=(3,3))
FM.show_snapshot(0,ax)
print("Summary Statistic for the whole timestep (clear, tree, fire)")
print(FM.summarize())
Summary Statistic for the whole timestep (clear, tree, fire)
[(49.11, 50.44, 0.44), (50.0, 49.44, 0.56), (50.89, 48.44, 0.67), (52.56, 46.56, 0.89), (54.33, 44.67, 1.0), (55.89, 43.33, 0.78), (56.89, 41.89, 1.22), (58.78, 40.0, 1.22), (60.33, 38.67, 1.0), (61.89, 37.0, 1.11), (63.33, 36.0, 0.67), (64.33, 35.33, 0.33), (64.78, 35.0, 0.22), (65.11, 34.78, 0.11), (65.22, 34.67, 0.11), (65.44, 34.22, 0.33), (65.78, 34.0, 0.22), (66.33, 33.33, 0.33), (67.11, 32.44, 0.44), (67.67, 32.0, 0.33), (68.0, 31.67, 0.33), (68.44, 31.33, 0.22), (68.67, 31.22, 0.11), (68.78, 31.11, 0.11), (68.89, 31.11)]
Leave a comment